Активное развитие роботизированной хирургии пришлось на 1980–2000 годы. Этот период стал временем поиска оптимальных решений, которые впоследствии были внедрены. Самый известный робот-хирург – da Vinci. Тысячи аппаратов разных его версий установлены в медицинских учреждениях не только США, где он был разработан, но и других стран. С 2007 года эта система используется в России (первый аппарат был установлен в Свердловской областной клинической больнице №1). Но было бы заблуждением считать, что Да Винчи – первый и единственный роботизированный комплекс для хирургии. Роботы-хирурги появлялись до него и активно разрабатываются сейчас (точнее с 2017 года).
Но обо всем по порядку. И для начала внесем ясность в терминологию. Хотя мы именуем эти системы роботами-хирургами, это не совсем правильное название, не отражающее их сути. Вернее было бы говорить о робот-ассистирующей хирургии, так как они не действуют самостоятельно и независимо, а управляются человеком (как минимум, так было до прошлого года, но об этом в конце статьи).
Содержание:
- История роботизированной хирургии: от PUMA до Da Vinci
- Роботизированная хирургия
- Начало роботохирургии: в поисках эффективного решения
- Роботизированная хирургия с da Vinci: достоинства и недостатки
- Аналоги da Vinci: Medbot Toumai MT 1000 и Senhance
- Новейшая история
- Шокирующие возможности: операция без прямого участия человека
- Заключение
Роботохирургия – это проведение операций с использованием специального оборудования. Хотя «роботы» не являются роботами в прямом смысле слова и не заменяют человека за операционным столом, они решают ряд серьезных проблем, еще совсем недавно препятствовавших проведению многих сложных операций.
Роботизированная хирургия
Роботохирургические техники и технологии позволяют проводить эффективные и безопасные малоинвазивные операции наряду с хирургией одного прокола (SILS) и эндоскопической транслюминальной хирургии через естественные отверстия (NOTES).[3] Они открыли новую веху развития лапароскопии.
Главные достижения роботизированной хирургии:
Для пациентов:
- Сохранение жизненно важных функций;
- Минимизация повреждения органов и тканей;
- Снижение вероятности осложнений после операции;
- Минимизация потери крови и ускоренное восстановление;
- Сохранение нервных пучков, крупных сосудов, отдельных органов;
- Повышение точности управления роботохирургическими инструментами;
- Удобный доступ к операционному полю, лучшая видимость органа;
- Применение микроинструментов;
- Внедрение цифровых медицинских технологий;
- Повышение качества оказываемой медицинской помощи;
- Повышение проходимости (оборачиваемости койко-места);
- Увеличение привлекательности клиники для пациентов, престижа.
Нельзя игнорировать пользу роботохирургии для развития здравоохранения и защиты общественного здоровья. Являясь частью цифровой медицины, они способствуют существенной экономии и оптимизации коечного фонда, повышению качества медицинской помощи за счет внедрения передовых технологий лечения пациентов и, как следствие, народосбережению страны.[1]

Как работает робот-хирург
Хотя первые роботизированные системы появились в конце 1980-1990 годах, их строение почти не изменилось.
Главные элементы системы:
- Консоль хирурга – рабочее место врача, позволяющее ему, находясь в удобной позе, вести операцию, управляя манипуляторами;
- Роботизированные манипуляторы, повторяющие движения хирурга, смягчая дрожание рук (одна из главных проблем при лапароскопии, ведь длина инструментов значительна);
- Камера и оптическая система, обеспечивающие обзор места операции под разными углами и предоставляющие увеличенное изображение рабочего поля;
- Роботохирургические инструменты для резания, коагуляции, шитья и других манипуляций.
Сама операция осуществляется с минимальной степенью инвазивности: для доступа к месту операции производятся несколько разрезов длиной не более 1 см, в которые вводятся инструменты и видеокамера. Хирург, находясь за консолью, управляет инструментами, ориентируясь на изображение, передаваемое с камеры.
Благодаря увеличенному изображению и роботизированным манипуляторам, нивелирующим тремор, работа робота-хирурга по точности превосходит работу человека во время лапароскопической операции.
Минимальная инвазивность роботохирургических операции способствует быстрому восстановлению больных, что увеличивает возможности медицинского учреждения по оказанию помощи пациентам. Однако путь к этим показателям был непростым и долгим.
Об автоматизации люди мечтали с древности. В 350 году до н. э. Архит Тарентский сконструировал летающего голубя с паровым двигателем. В 15 веке механического рыцаря создал Леонардо да Винчи (впоследствии «подаривший» имена не одной роботизированной системе).
Слово «робот» в близком к его сегодняшнему значении впервые употребил Карел Чапек в 1920 году в пьесе «Универсальные роботы Россума». А Айзек Азимов развил тему робототехники, сформулировав в 1940-х свои «Три закона».
Что же касается роботизированных операций в хирургии, то их напророчил еще Джордж Лукас в 1980 году: в фильме «Звездные войны» именно робот установил Люку Скайуокеру механический протез кисти руки.
В промышленности роботы впервые стали применяться на заводе General Motors в 1961 году для автоматизации опасных для человека работ.[6]. И что иронично, именно манипулятор, созданный для General Motors, спустя 24 года, был впервые использован в хирургии.
Первое применение робота в хирургии
Это случилось в 1985 году. Именно тогда промышленный робот-манипулятор PUMA, созданный для сборочных линий автомобильного завода General Motors, после усовершенствований принял участие в стереотаксической биопсии головного мозга.
В отличие от современных роботов-хирургов, участие PUMA было ограничено одной задачей: рассчитать оптимальную траекторию и выставить направляющее устройство для ввода биопсийной иглы. Для этого ему были предоставлены данные КТ-сканирования с точным местоположением новообразования.
Ввод иглы хирург осуществлял вручную через фиксированную втулку. Роботом он также не управлял.
Несмотря на то, что первая операция прошла удачно, производитель PUMA запретил его использование в хирургии, вероятнее всего, из-за опасений понести репутационные и юридические риски. Однако этот опыт положил начало целому направлению цифровой медицины.
Начало роботохирургии: в поисках эффективного решения
Первой допущенной на рынок ЕС компьютеризированной роботизированной хирургической системой стал ROBODOC, задуманный Говардом «Хэпом» Полом и Уильямом Багардом для эндопротезирования суставов.
Работа началась в 1986 году. Толчком к созданию ROBODOC стало появление пористых имплантатов, повышающих безопасность и эффективность операций за счет срастания их с костью. Долговечность таких имплантатов напрямую зависит от размеров зазоров и точности установки. Для создания выемок под имплантаты и понадобился новый аппарат, представлявший собой пятиосевой манипулятор SCADA с режущей головкой на конце. На головке также размещались шестиосевой датчик давления и система подачи воды для охлаждения и удаления пыли.


ROBODOC успешно прошел испытания на собаках с травмами бедра, а после – под контролем FDA – на людях. Он обеспечивал высокую точность реза – до 0,5 мм, снимая всего на 0,54% больше костной ткани, чем нужно (хирурги удаляли на 30% больше ткани).
Производитель робота-хирурга получил престижную премию Computerworld Smithsonian Award в номинации «Инновации в искусстве и науке в медицине». Однако через несколько лет клинических испытаний, когда система была допущена на рынок ЕС, её применение пришлось прекратить из-за несчастных случаев. Лишь в 2008 году, после усовершенствований и повторных испытаний, робот был одобрен FDA.
На развитие инновационных технологий в роботизированной хирургии оказали существенное влияние военные. Можно сказать, если бы не они, мы еще долго не увидели бы робота-хирурга вроде da Vinci.
В том же году, когда Говард «Хэп» Пол и Уильям Багард приступили к работе над ROBODOC, доктор философии Стэнфордского исследовательского института (SRI) Фил Грин начал исследования по созданию дистанционно управляемого хирургического манипулятора для выполнения микрохирургических операций. В 1987 году к институту присоединился Ричард Сатава – военный врач, полковник армии США. Началось строительство прототипа.
«Хирургическая система телеприсутствия» состояла из двух частей: рабочего места хирурга и удаленного хирургического блока. Рабочая станция включала трехмерный монитор, использовавший принцип поляризации, динамик и была эргономично спроектирована для обеспечения погружения оператора в виртуальную среду. Дистанционный хирургический блок состоял из двух манипуляторов со сменными наконечниками и стереоскопической видеокамеры. Приборы допускали четыре степени свободы движений и обеспечивали обратную связь.[6]
В 1989 году фокус работы был смещен с микрохирургии на лапароскопическую хирургию. Это произошло после того, как полковник Сатава оценил преимущества телеприсутствия при лапароскопии: снижение тремора, повышение ловкости, стереоскопическое зрение и т. д.[6] А в 1992 году, с назначением Сатава в программу передовых биомедицинских технологий DARPA, прототип SRI являлся центральным элементом более масштабной концепции: подвижной медицинской помощи (MEDFAST).
Задачей разрабатываемого оборудования было оказание помощи раненым. Хирург должен был выполнять операцию удаленно, тогда как раненый находился внутри специально оборудованного бронированного автомобиля. Таким образом в мобильной операционной были объединены передовые разработки того времени, включая транспортировку больных, цифровую рентгенографию, электрохирургию, анестезию, аспирацию и роботизированную медицинскую сестру, в функции которой входила выдача лекарств и замена инструментов. Планировалось оснастить её и КТ. Для работы требовалось кабельное подключение.[6]
MEDFAST разрабатывался для работы в движущемся транспорте, поэтому важное значение приобретало уменьшение тремора рук хирурга, а система камер была усовершенствована за счет увеличения разрешения, улучшения стабильности, усиления зума; положение камеры могло подстраиваться под внешнее движение, сохраняя стабильный обзор для хирурга.[6]
В 1993 году на полевых учениях в штате Джорджия был представлен прототип системы. Затем MEDFAST была представлена на съезде Ассоциации армии США. После этого прошел ряд успешных операций на животных моделях (сосудистые, лечение висцеральных повреждений на моделях свиней in vivo, нефрэктомия и восстановление мочевого пузыря). Результат был хорошим, но продолжительность операций – намного дольше, чем полостных. Кроме того, оказалось сложно обеспечить необходимую скорость связи, что привело к заморозке программы. Её перезапустили только в 2000-х под названием Trauma Pod.
С грантом DARPA начал работу над роботизированной хирургической системой AESOP Юлун Ванг (основатель компании Computer Motion). Этот роботизированный лапароскоп стал первым роботом-хирургом, одобренным FDA (1994 год).
А уже в 1996 году Computer Motion представила интегрированную систему для операционной с голосовым управлением HERMES. В том же году компания начала выпуск полной роботизированной системы для хирургии ZEUS. Она состояла из AESOP и двух роботических рук с шестью (позднее – семью) степенями свободы движения, полностью нивелировала тремор, в ней появилось масштабирование движений.[6]
FDA одобрила ZEUS в 2001 году. К тому моменту система уже применялась при реанастомозе маточных труб и аортокоронарном шунтировании. А в 2001 году она была использована при проведении первой телехирургической процедуры –лапароскопической холецистэктомии. Следующий робот-хирург с древнегреческим именем SOCRATES от Computer Motion был одобрен FDA в том же 2001 году.
Глядя на перечень достижений Computer Motion, можно предположить, что развитием роботизированных технологий в хирургии в 1990-2000 годы мы почти исключительно обязаны этой компании. Однако это будет неверно. Почти с самого начала у Computer Motion был серьезный соперник – Intuitive Surgical, основанная в 1995 году докторами Фредом Моллом, Джоном Фройндом и инженером Робертом Янгом.
Их первый прототип робота-хирурга, названный Lenni в честь Леонардо да Винчи и основанный на разработках SRI, состоял из трёх роботизированных рук (одна для лапароскопа и две для инструментов) с семью степенями свободы.
Во втором прототипе – Mona (в честь Джоконды) – были добавлены сменные инструменты, однако у него не было держателя камеры, поэтому работать можно было только с ассистентом, что стало серьезным недочетом. Несмотря на это, Mona стала первым роботом-хирургом, который стали применять с участием человека, и это случилось в 1997 году, то есть за год до использования ZEUS. Забавно, что статью о первой операции с помощью Mona отказались напечатать ведущие медицинские журналы, пояснив при этом: «Очень маловероятно, что это произошло на самом деле».
В 1997 году роботизированная хирургия все еще выглядела фантастикой. Но в следующем же году были проведены две робот-ассистирующие операции: первая фундопликация по Ниссену (с помощью усовершенствованной системы, состоящей из руки с лапароскопом) и бандажирование желудка. В обоих случаях врачами применялось определение «лапароскопическая хирургия с телеприсутствием».
В 1998 году Intuitive Surgical представил робота-хирурга нового поколения da Vinci. Хотя система имела привычный вид и состояла из консоли хирурга, тележки пациента с оптической системой и инструментальными манипуляторами, внутри она значительно отличалась от предшественниц.


Качество визуализации было повышено новым 3D-лапароскопом с системой, обеспечивающей раздельный видеопоток для левого и правого глаза хирурга. Интерфейс между прибором и манипуляторами был усовершенствован и, как следствие, менее подвержен сбоям, а контроллеры – модернизированы.[6]
После двух лет испытаний, в 2000 году, da Vinci получил одобрение FDA и был достаточно быстро внедрен на рынок. Подобно ZEUS, изначально он создавался для кардиоторакальной хирургии, но нашел более широкое применение в урологии.
Соперничество двух компаний вылилось в патентную войну, завершившуюся в 2003 году их слиянием и прекращением выпуска роботизированных систем ZEUS в пользу da Vinci.[6] На сегодняшний день разработаны несколько поколений da Vinci: S, Si, Si HD, X, Xi. Усовершенствование робота позволило расширить области его применения в хирургии: в гинекологии, урологии, общей хирургии (особенно с 2016 года).
Роботизированная хирургия с da Vinci: достоинства и недостатки
Роботизированная хирургическая система da Vinci доступна в России. Регистрационное удостоверение ФСЗ 2010/06970.
Как уже было сказано выше, роботизация лапароскопических операций делает их безопаснее и точнее и способствует повышению эффективности медицинского учреждения: пациенты скорее выздоравливают, выписываются и можно принимать новых больных.
da Vinci вывел робот-ассистирующую хирургию на новый уровень: снижение тремора рук, исключение эффекта точки опоры, увеличение изображения и обзор под разными углами, масштабирование движений хирурга позволили добиться высокого качества операций при минимальной инвазивности.[3]
da Vinci нашел применение во многих областях: урологии, гинекологии, общей хирургии, торакальной хирургии, кардиологии, лор-хирургии, эндокринологии и т. д.
Но есть у знаменитого робота-хирурга и недостатки. К ним относятся высокая стоимость, продолжительная анестезия и операция в сравнении с традиционными лапароскопическими операциями,[3] недостаточная точность и ограниченная обратная связь.[4]
Аналоги da Vinci: Toumai MT 1000, Senhance, Versius, MiroSurge
Агрессивная политика Intuitive Surgical затормозила развитие в сфере, до сих пор Да Винчи остается наиболее известным и востребованным роботом-хирургом в мире, несмотря на высокую стоимость расходных материалов, накладывающую существенные расходы на медучреждение.
На счастье конкурентов, срок действия патентов на промышленный образец в США ограничен. Как только он истек, гонка роботизированных технологий для хирургии возобновилась.
Первой после ZEUS и da Vinci одобрение FDA получила итальянская система Senhance компании TransEnterix.[6] Также за место на рынке борются китайский робот-хирург Medbot Toumai MT 1000, британская хирургическая платформа Versius. С 2010-х идет разработка роботизированной системы MiroSurge на основе мини-роботов MIRO. Рассмотрим эти аппараты в качестве аналогов Да Винчи.
Лапароскопическая система Senhance
Роботизированная хирургическая система Senhance доступна в России. Регистрационное удостоверение РЗН 2020/12899 от 5 мая 2022 года.
Система позиционируется как решение для цифровой лапароскопии, может применяться в общей, торакальной хирургии, гинекологии, урологии, педиатрии.
Функционально Senhance – это система малоинвазивной хирургии на 3 или 4 роботизированные руки, рассчитанная на хирургов с опытом в лапароскопии и позволяющая эффективно применять его в роботизированной хирургии.
Специалисты относят к её достоинствам отсутствие фиксации роботических рук к троакарам, хорошую обратную (тактильную) связь, дающую ощущение работы в зоне операции, отслеживание движений глаз хирурга для управления камерой, отдельные, но взаимозаменяемые мехатронные консоли для каждого инструмента и видеосистемы.[6]

Роботизированная хирургическая система Senhance нивелирует тремор рук и обеспечивает масштабирование движений хирурга для повышения их точности.
Поддержка интеллектуальной цифровой системы позволяет хирургу лучше ориентироваться в ситуации и принимать правильные решения.
Система имеет большой арсенал многоразовых сменных лапароскопических инструментов разных размеров: 3, 5, 10 мм, что позволяет проводить сложные операции, включая педиатрические, с высокой точностью. Смена инструментов в стерильном поле возможна за 2 минуты.
FDA одобрила применение Senhance в колоректальной, гинекологической хирургии, хирургии грыж и холецистэктомий.[6] По данным ведомства, применение этого робота-хирурга на 30% сокращает время операционного вмешательства и снижает болевые ощущения.
Обслуживание инструментов Senhance доступнее, чем у da Vinci. Это делает её более экономичным и выгодным решением для медицинских организаций.
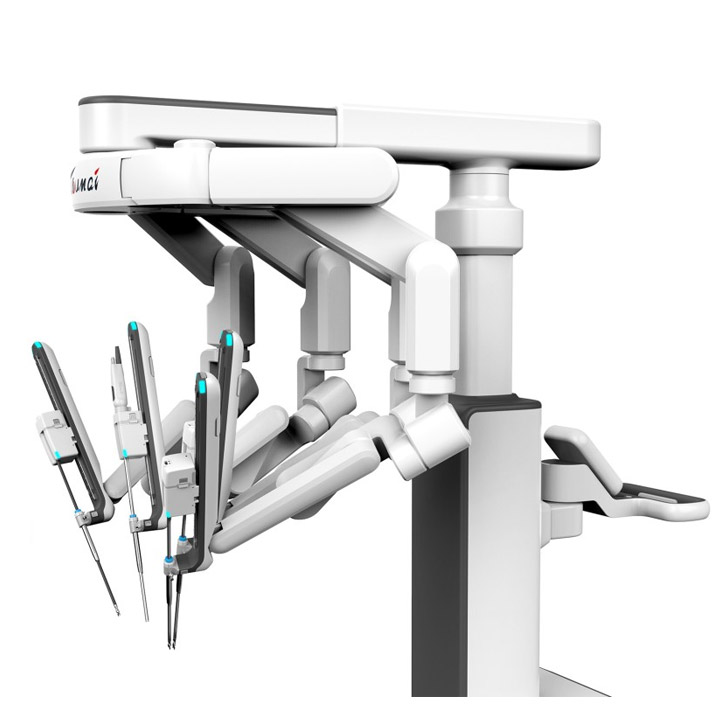
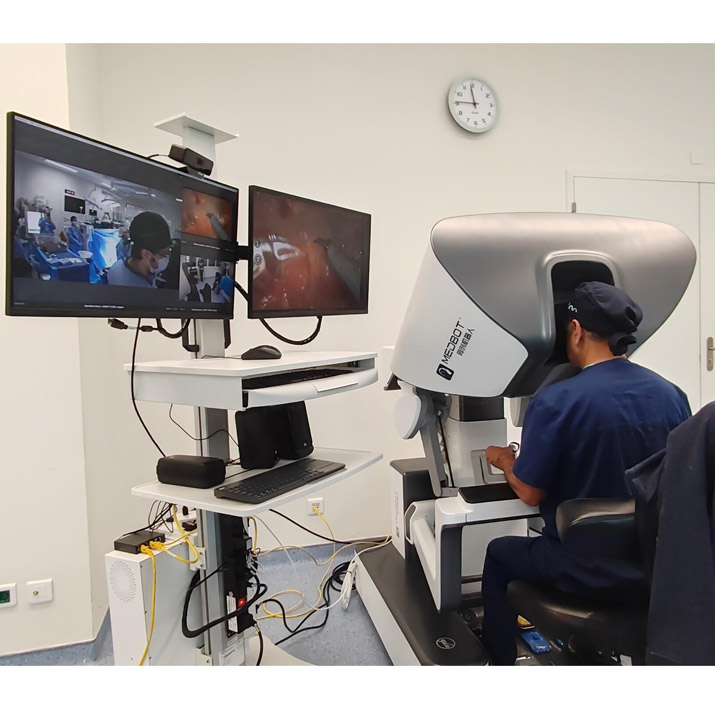
Medbot Toumai MT 1000
Роботизированная хирургическая система Microport Medbot Toumai MT 1000 доступна в России. Регистрационное удостоверение РЗН 2025/25698 от 18.06.2025.
Еще одна интересная роботизированная система для хирургии – Toumai MT 1000 китайской компании MicroPort MedBot.
Китай в последние годы занял прочное место в авангарде разработки и производства медицинского оборудования, и Toumai MT 1000 тому подтверждение. В нем воплощены новейшие достижения робототехники, цифровой медицины и телемедицины, применяется искусственный интеллект и поддержка голосовых команд.

К основным преимуществам хирургического робота Microport Medbot Toumai MT 1000 относят:
- 7 степеней свободы инструментов, высокая точность позиционирования – 0,1 мм и рабочий радиус до 50 см;
- Высокое качество визуализации: 3D Ultra HD (4K), 10-кратное увеличение, автоадаптация резкости, режим спектрального анализа тканей;
- Фильтрация тремора и масштабирование движений хирургов (5:1, 10:1 и 20:1);
- Совместимость с навигационными системами: КТ, МРТ, 3D-ангиография и т. д.;
- Возможность проведения совместных операций двумя хирургами за счет двухконсольной конфигурации;
- Адаптивность для разных задач (гинекология, урология, торакальная, сердечно-сосудистая) за счет модульной конструкции;
- Поддержка многопортовых и однопортовых хирургических подходов.
Адаптивный интерфейс с ИИ-помощником повышает комфорт работы с Medbot Toumai MT 1000 и снижает влияние на результат операции человеческого фактора. Безопасность робота-хирурга также повышают запатентованные технологии, такие как контроль инструментов вне рабочего поля, предупреждение о столкновении в реальном времени, автоматическая классификация и распознавание тканей.
Toumai MT 1000 поддерживает телементоринг, включая AR-консультации, что играет важную роль при обучении хирургов и проведении сложных операций.
В июне 2025 года хирургический робот Microport Medbot Toumai MT 1000 получил регистрационное удостоверение медицинского изделия РЗН 2025/25698, что подтверждает его безопасность и соответствие российским стандартам. Более того, о его качестве свидетельствуют премии, присужденные системе: «A’ Design Award 2022» за инновационный дизайн и 3D-визуализацию, «Red Dot Award 2022» за выдающийся промышленный дизайн и «SAIL Award 2022» за передовой искусственный интеллект и автономную разработку.
Хирургическая платформа Versius
Роботизированная платформа Versius от CMR Surgical вышла на рынок в 2019 году. Специалисты отмечают удобство работы: открытая консоль позволяет хирургу взаимодействовать с роботом стоя или сидя, что снижает стресс и утомляемость.[7]
Система Versius может быть оснащена до 5 манипуляторов. Каждый из них представляет собой отдельную роботизированную единицу, предназначенную для большей свободы размещения портов. Технология V-Wrist обеспечивает 7 степеней свободы, движение запястья на 360° и тактильную обратную связь.[7]

Преимуществом Versius специалисты называют отдельные роботизированные руки, фактически имитирующие лапароскопические руки. Расположение роботизированного и лапароскопического портов идентично, поэтому робот-хирург позволяет дублировать этапы лапароскопии.[7]
На основании научных работ делатся вывод, что Versius может безопасно и эффективно использоваться при выполнении минимально инвазивных операций в висцеральной хирургии, урологии, гинекологии, колоректальной хирургии, торакальной хирургии.[7]
Система минимально инвазивной хирургии MiroSurge
Разработка принадлежит Институту робототехники и мехатроники Немецкого аэрокосмического центра (DLR) и представляет собой роботизированную систему по принципу «ведущий-ведомый», состоящую из трех легких роботических MIRO-манипуляторов, закрепляемых на столе, и консоли хирурга открытого типа.[9] К её достоинствам относят компактность и скорость замены инструмента.[8]

Хирург сидит непосредственно перед монитором, обладающим способностью автофокусировки. Манипуляторы имеют 7 степеней свободы движений и схожую с человеческой кинематику.[8][9]
Роботизированная система MiroSurge прошла клинические испытания в Индии в 2017 году, а в 2019 была представлена в США. На 2019 год на стадии разработки был 10-й прототип системы.[9]
Новейшая история
В 2020-х годах роботическая хирургия продолжила массовое развитие, предлагая все более универсальные и доступные решения. Так в 2022 году на рынок вышли сразу две роботизированные хирургические системы: Hugo RAS от Medtronic (Ирландия/США) и SSi Mantra от SS Innovations (Индия).
Hugo RAS от Medtronic (Ирландия/США)
Система имеет модульную архитектуру, состоит из отдельных независимых манипуляторов (от 2 до 4 манипуляторов) и поддерживает работу со стойками и инструментами различных производителей. Hugo RAS обладает всеми современными технологиями, включая помощников на базе ИИ. А спектр выполняемых операций расширяется с каждым годом. На момент написания материала Hugo RAS уже поддерживал абдоминальную хирургию, лечение диафрагмальных и паховых грыж, операции в гинекологии и урологии. На момент написания материала система доступна для клиник Европы. В США модель одобрена в качестве исследовательского устройства.

SSi Mantra от SS Innovations (Индия)
На сегодняшний день доступно уже третье поколение SSi Mantra. В своем продукте производитель делает ставку не только на широкую функциональность (система поддерживает более 100 типов операций, включая кардиологию), но и на доступность для широкого круга населения мира. По своей идеологии Mantra является конкурентом Tuomai, однако концептуально отличается конструкцией на базе отдельных манипуляторов, которых может быть до 5 шутк.

Узкоспециализированные роботы
Помимо универсальных хирургических систем сегодня активно развиваются роботизированные помощники для узких областей:
- роботизированные навигационные системы, позволяющие с точностью до десятой доли миллиметра разметить и спланировать доступ к сложным участкам, например, при операциях на мозге;
- эндоскопические роботы, позволяющие проводить манипуляции через естественные отверстия;
- микро- и нанороботы, используемые для лечения аневризм и таргетной доставки препаратов в ткани и органы.
Шокирующие возможности: операция без прямого участия человека
В начале статьи мы упоминали, что роботы-хирурги не были независимыми в медицине до 2025 года. Настало время раскрыть интригу.
Оговоримся, что еще в 2016 году была сделана удачная попытка автономного использования робота для проведения хирургической операции. Робот STAR, созданный в Children’s National Medical Center (Вашингтон), провел кишечный анастомоз, точно и деликатно наложив швы. Но в том случае машине ассистировал человек.
А в 2025 году в Университете Джона Хопкинса роботизированной системой SRT-H впервые в истории была проведена самостоятельная операция – холецистэктомия на мягких тканях свиньи с помощью робота-хирурга Да Винчи.
SRT-H базируется на нейронной сети трансформерного типа, анализирует ход операции, самостоятельно принимает решения, понимает голосовые команды и со временем улучшает свои алгоритмы, как стажер под руководством наставника.
Конечно, это не означает, что мы увидим независимо оперирующих роботов-хирургов в ближайшем будущем: для оперирования живых существ системе еще многого не хватает, в частности – объема данных о кинематике. Но первый опыт ИИ робота-хирурга впечатляет.[5]
В следующем материале рассмотрели использование ИИ в роботизированной хирургии подробнее.
Заключение
Роботизированные технологии в хирургии активно развиваются. Несмотря на некоторый «застой» из-за монопольной политики производителей da Vinci, с 2017 года на рынок выходит все больше систем от разных компаний, как из США, так и из других стран.
Роботохирургические техники и технологии повышают качество операций, их точность, уменьшают травмы тканей, кровопотерю и время нахождения пациента в больнице, что выгодно и самому больному, и клинике, и государству. Сокращение времени восстановления позволяет людям быстрее возвращаться к активной жизни, больницы повышают оборачиваемость койко-места, а государство тратит меньше средств на медицинское обеспечение граждан.
Основная область применения роботизированной хирургии – малоинвазивные операции, которые позволяют не только уменьшить размер швов, но и, что важнее, снизить риск инфицирования больных, ускорить заживление и уменьшить боль.
В таких направлениях медицины, как гинекология, лечение рака, минимально инвазивные вмешательства уже потеснили полостные операции, хотя пока ни одна из них не может быть признана «золотым стандартом».[2][3]
Роботы-хирурги, в том числе с ИИ, являются перспективным направлением лапароскопической хирургии и показывают высокие результаты. К их недостаткам относятся меньшая скорость по сравнению с человеком, дороговизна обслуживания и в некоторых случаях недостаточная обратная связь. Однако ученые работают над усовершенствованием роботизированных систем в хирургии, что доказывают такие их представители, как da Vinci, Senhance и Toumai MT 1000.