С момента внедрения робот-ассистированной хирургии процент её среди лапароскопических операций неуклонно растет. Все больше пациентов хотят быть прооперированными минимально инвазивно, минимально травматично, с гарантией скорейшего восстановления и уменьшением болей. Это ставит перед врачами и медицинскими учреждениями новые задачи, в числе которых: овладение хирургами навыками работы с роботизированными системами, выбор и закупка роботохирургических систем. В статье сделаем обзор медицинских роботов-хирургов на основе публикаций российских и зарубежных авторов.
Содержание:
- Робот-ассистированная хирургия: безопасность и экономичность
- Обзор роботохирургических систем
- Заключение
Робот-ассистированная хирургия (РАХ) за прошедшие 30 лет достигла больших успехов, однако долгое время её развитие тормозила монополия Intuitive Surgical (производителя хирургического робота да Винчи). Сейчас на сцену выходят новые разработчики и производители роботохирургических систем, способных составить конкуренцию лидеру рынка. Многие из них имеют преимущества перед Да Винчи, такие как модульное строение, открытая консоль, обратная связь, доступная цена и стоимость обслуживания. Но специалисты отмечают, что их интеграция в повседневную клиническую практику будет зависеть от публикаций результатов рандомизированных испытаний, которые позволят обосновать существенные клинические преимущества этих систем.[1][5]
Робот-ассистированная хирургия: безопасность и экономичность
Роботизированная хирургия – новый этап развития хирургии, ознаменовавший собой повышение качества и безопасности лапароскопических операций.
К её достоинствам относятся:[1][3][9]
- Минимальная травматичность;
- Меньшее количество осложнений;
- Сокращение периода пребывания пациентов в стационаре;
- Оптимизированная эргономика для оперирующего хирурга;
- Стабилизация хирургических инструментов во время операции;
- Снижение расходов медучреждения на содержание пациентов;
- Повышение проходимости хирургических отделений за счет быстрой выписки пациентов.
Специалисты отмечают, что пациенты стали испытывать меньший страх перед хирургическими вмешательствами[1], что также немаловажно при планировании операций.
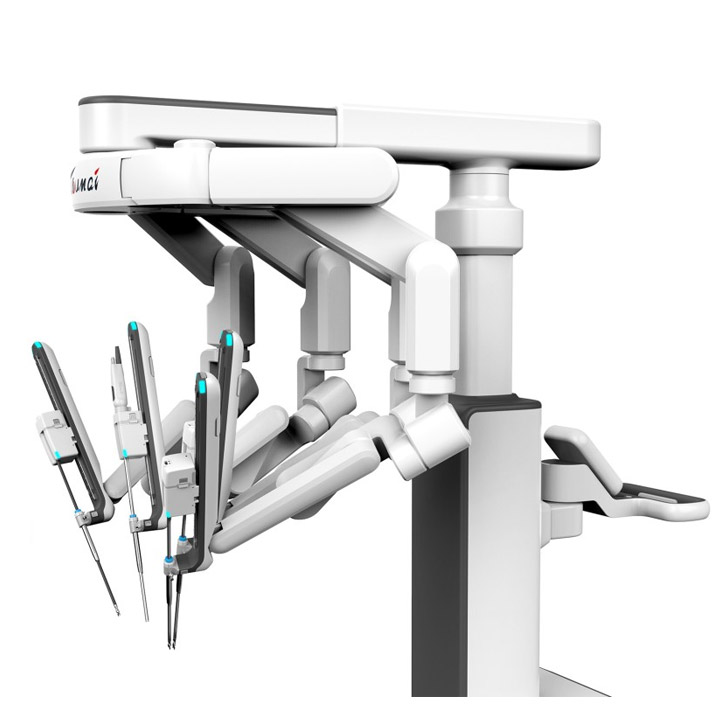
Конструктивно робот-хирург состоит из: консоли хирурга; роботизированных манипуляторов; роботохирургических инструментов; камеры и оптической системы.
Применение манипуляционного робота во время операции позволяет хирургу:
- Повысить точность действий за счет минимизации тремора;
- Снизить травматичность вмешательства и кровопотерю.
Хирург не контактирует с пациентом напрямую. Его движения передаются роботическим рукам робота и микроинструментам. Миниатюрная камера передает трехмерное цветное изображение в режиме реального времени, позволяя хирургу согласовать свои действия с действиями машины. Роботические манипуляторы делают движения более плавными, позволяют контролировать скорость движения, обеспечивая точность операции и сохранение самых тонких сплетений нервов и кровеносных сосудов.[4]

Современные роботизированные системы для хирургических операций позволяют применять наиболее передовые лапароскопические методики, такие как LESS (laparoendoscopic single-site surgery, однопортовая хирургия), SILS (single Incision laparoscopic surgery, хирургия одного прокола), NOTES (эндоскопическая транслюминальная хирургия через естественные отверстия).[1][3]
Применение роботизированных хирургических систем повышает точность и безопасность проведения лапароскопических вмешательств даже по сравнению с работой опытных хирургов, хотя о превосходстве в скорости говорить пока рано.
Однако во многих областях робот-ассистированная хирургическая техника уже показала себя достаточно хорошо. По данным на 2017 год[9], порядка 30% от робот-ассистированных операций в мире составляли абдоминальные операции. Особенно распространены такие вмешательства, как: резекция прямой кишки, фундопликация, резекция поджелудочной железы, печени, удаление неорганных забрюшинных опухолей. Эффективно применение роботохирургических систем при операциях в глубине малого таза.[9]
Однако на сегодняшний день роботы-хирурги применяются в медицине не так широко, как это возможно, что обусловлено: их новизной и высокой сложностью, отсутствием систематизации и глубокого анализа результатов.[9] И даже обзоры роботизированных систем в основном посвящены самой популярной из них – da Vinci, тогда как о других в работах специалистов не так много информации.
Рассмотрим, что собой представляет и как работает робот-хирург, на примере Да Винчи и аналогичных систем.
Обзор роботохирургических систем
da Vinci – эталон современной роботохирургии
По мнению ряда специалистов,[1][5] сейчас da Vinci – наиболее совершенная платформа для роботизированной хирургии. Этот комплекс прошел долгий путь развития – от проекта телехирургии поля боя (Da Vinci 2000 и da Vinci S), целью которого было оказание быстрой хирургической помощи солдатам во время транспортировки, до современных роботизированных хирургических систем da Vinci SP и da Vinci 5.[1][5] В пользу системы говорит и то, что робот-хирург Да Винчи первым в истории получил одобрение FDA (2001 год). Вкратце рассмотрим историю развития линейки роботов Да Винчи.
В основу системы da Vinci 2000 легли разработки NASA. Система состояла из консоли хирурга закрытого типа, 3D оптической системы и трех роботических рук, расположенных на тележке пациента. Техническая поддержка прекращена в 2015 году.[1]
В следующей модели роботизированной хирургической системы da Vinci S разработчики представили более широкий диапазон движений, более длинные роботические руки, добавили возможность применения биполярной энергии и (опционально) HD разрешение оптической системы или четвертую роботическую руку. В этой системе появились инструменты EndoWrist с 6 степенями свободы и управлением посредством манипуляторов, позволяющих детально передавать движения рук хирурга. Техническая поддержка прекращена в 2018 году.[1] Система имеет РУ ФС № 2006/1962 от 11.12.2006 года.
Роботохирургическая система Da Vinci Si была представлена в 2009 году. Её уникальными преимуществами стали HD оптическая система, переключение между инструментами с помощью манипуляторов и система Fire-Fly (флуоресценция). Возможность интеграции второй консоли хирурга позволила создать и осуществить систему обучения робот-ассистированной хирургии. Система da Vinci Si позволяет использовать систему VeSPA для однопортовых операций, но однопортовые инструменты обладают лишь 4 степенями свободы.[1] Система имеет РУ ФСЗ 2010/06970 от 26.05.2010 года.

В модели Da Vinci Xi, представленной в 2014 году, значительно изменилась тележка. Ее архитектура с креплением на стреле позволяет производить стыковку под любым углом и улучшает доступ к пациенту. Присоединение системы стало проще за счет возможности подведения рук из вертикального положения. 8-миллимитровую камеру можно было расположить в любой роботической руке, обеспечив стабильное увеличенное 3D-HD-изображение. Роботические руки стали меньше, как и расстояние между ними, что снизило вероятность инструментального конфликта. В da Vinci Xi появилась возможность изменения положения операционного стола после присоединения всех рук системы. Кроме того, с системой совместима новейшая тележка для однопортовой хирургии — платформа SP. При этом используются инструменты, обладающие 6 степенями свободы.[1][5] Система контроля эндоскопических инструментов Intuitive Surgical da Vinci Xi (хирургическая система da Vinci Xi IS4000) имеет РЗН 2017/6330 от 06.10.2017 года.
Система для проведения однопортовых робот-ассистированных операций da Vinci SP (Single-Port) была представлена в 2018 и одобрена FDA в том же году. Ввод камеры через одно отверстие снижает инвазивность операции и способствует ускоренному восстановлению пациентов. Стоит отметить наличие многочисленных отчетов об удачном применении da Vinci SP в решении сложных урологических задач, таких как простатэктомия, донорская нефрэктомия и цистэктомия.[5]
Робот-хирург da Vinci 5 был представлен в 2024 году и имеет более 150 конструктивных усовершенствований и инноваций по сравнению с системами четвертого поколения. В нем применяются контроллеры хирурга и манипуляторы следующего поколения с дополнительными датчиками, что позволяет вывести робот-ассистированную хирургию на новый уровень, обеспечив более плавное движение инструментов и низкое сопротивление, независимо от скорости движения. Повышена эффективность фильтрации тремора и вибрации, а также качество обратной связи[5], бывшей для Да Винчи слабым местом в сравнении с другими роботами-хирургами.[1] Система была одобрена FDA для тех же показаний, что и da Vinci Xi, за исключением кардиологических и педиатрических процедур, но по заверению производителя он будет работать над снятием этих ограничений.[5]
Исследования и применение
Сейчас роботизированные комплексы da Vinci применяются для операций в: урологии, гинекологии, общей хирургии, торакальной хирургии, эндокринологии, лор-хирургии, кардиологии, колоректальной хирургии и для других операций. Специалисты отмечают их эргономичность, высокое качество 3D-изображения поля операции, нивелирование тремора рук, более высокую точность манипуляций и увеличенный диапазон движений, нулевой риск заражения ВИЧ и гепатитом. Что касается пользы для пациентов, то применение Да Винчи позволяет уменьшить болевой синдром и кровопотерю, сократить количество осложнений и период восстановления. Отмечается меньший размер шрамов и лучший косметический результат по сравнению с традиционной полостной операцией.[3]
За 26 лет присутствия на рынке хирургические роботы da Vinci завоевали для себя первенство среди аналогичных систем. Стоит принять во внимание то, что Intuitive Surgical в полной мере использовала все имеющиеся у неё возможности для монополизации рынка.[5] До сих пор для многих хирургов нет робота кроме Да Винчи. Однако уже несколько лет производители разрабатывают хирургические роботы, не уступающие, а в чем-то превосходящие da Vinci.
К недостаткам Да Винчи специалисты относят большую продолжительность анестезии и операции по сравнению с традиционными лапароскопическими вмешательствами[3], недостаточную тактильную связь[1] и высокую стоимость.
Вопрос стоимости
Имеющаяся информация о стоимости покупки и обслуживания робота-хирурга Да Винчи переменчива, поскольку эти расходы складываются из нескольких частей:
- Покупка самой системы;
- Покупка инструментов и принадлежностей;
- Ежегодное техническое обслуживание системы.[5]
И хотя короткий срок пребывания пациентов в стационаре и снижение рисков осложнений действительно в некоторой мере компенсируют расходы на покупку роботохирургической системы Да Винчи, но её цена остается наиболее высокой в сегменте. Кроме того, дорого стоят инструменты и принадлежности.[5][10]
В то же время ряд относительно новых роботов-хирургов могут обеспечить снижение расходов медицинских учреждений. Например система Revo-i заявляет о снижении стоимости операций на 42% по сравнению с da Vinci, а использование одноразовых инструментов с роботом Avatera исключает затраты на стерилизацию. Расходы на обслуживание системы Senhance ниже, а применение традиционных лапароскопических инструментов снижает траты на расходники.[5]
Рассмотрим самые популярные на сегодняшний день системы – аналоги Да Винчи; их возможности, достоинства и недостатки в сравнении с лидером рынка.
Хирургические роботы – аналоги da Vinci
Отметим, что новые хирургические системы, созданные с прицелом на компенсацию недостатков Да Винчи, в отличие от неё, изначально применяются в разных областях хирургии. Если Да Винчи, когда она была допущена FDA впервые, позиционировалась как урологическая система, то, например, Toumai MT 1000 уже может использоваться, помимо урологии, в гинекологии, сердечно-сосудистой, торакальной и общей хирургии. Senhance применяется в урологии, гинекологии, общей и торакальной хирургии, а также педиатрии.[5]
Каждую из роботизированных хирургических систем – аналогов da Vinci, хотя ни одна из них до сих пор не достигла больших масштабов внедрения, продвигается центрами, демонстрирующими их безопасность и клиническую применимость. Так же стоит учитывать, что «соперники» Да Винчи, существующей в пяти поколениях, находятся на в первом-втором поколении, что позволяет ожидать их скорого улучшения и оптимизации.[5] В частности, уже сейчас существуют системы, более удобные, чем da Vinci: с открытой консолью, что позволяет хирургу работать сидя в удобном положении; ИИ-фильтрацией тремора, высокой тактильной чувствительностью.[1]
Роботизированная хирургическая система Senhance
Разработанная итальянской компанией Sofar система изначально называлась ALF-X, но была переименована после покупки Sofar американской компанией Transenterix.
Senhance состоит из 3D HD монитора, консоли хирурга открытого типа, четырех изолированных роботических рук, многоразовых лапароскопических инструментов, инфракрасной системы управления рук и камеры движением глазных яблок.

Важное преимущество Senhance перед Da Vinci – возможность адаптации под любую оптическую 3D-систему, что расширяет варианты выбора комплектации для ЛПУ.[1]
Многопортовая конфигурация позволяет разместить до 4-х независимых роботических рук, установленных на отдельных тележках. Одни специалисты отмечают эту особенность как преимущество Senhance, снимающее необходимость в специализированных операционных большой площади.[5] Другие, напротив, отмечают, что, хотя отдельно расположенные манипуляторы должны повысить маневренность, они затрудняют доступ к операционному столу при экстренных ситуациях и требуют большего размера операционной.[1]
Управление движениями камеры с помощью глаз освобождают руки хирурга, а высокая тактильная чувствительность создает ощущение «погружения» в процесс и повышает контроль роботических манипуляторов для деликатного обращения с тканями.[1][5] Кроме того, робот-хирург Senhance автономно рассчитывает силу, оказываемую роботическими руками на точку опоры троакаров, предотвращая чрезмерное натяжение тканей в точках введения на брюшной стенке.[5]
Возможность применения многоразовых инструментов делает Senhance более экономичным выбором для лечебного учреждения. Использование стандартных лапароскопических троакаров для введения роботических инструментов позволяет быстро переходить к обычной лапароскопии в экстренных ситуациях. Время стыковки робота составляет от 3 до 10 минут.[5].
Для оптической системы, а также для артикуляционного иглодержателя нужен 10 мм троакар; для остальных инструментов – 5 мм доступы.[1] Артикуляционной способностью обладает лишь иглодержатель, остальные инструменты имеют стандартные ограниченные степени свободы, характерные для лапароскопических инструментов, что является недостатком системы.[1][5]
Сидячее положение хирурга повышает комфорт во время продолжительных операций, а также позволяет наблюдать за его работой на одном мониторе, что удобно для обучения и совместных операций.[1][5] Монитор обеспечивает высокую четкость трехмерного изображения без применения специальных очков.[5]
Исследования и применение
В 2017 году Senhance стала первой робот-ассистированной системой после da Vinci, получившей одобрение FDA (для общей хирургии и гинекологии). Бо́льшая часть публикаций о хирургическом роботе Senhance посвящена применению в гинекологии и колоректальной хирургии.[1][5] Есть также публикации о применении в общей хирургии.[5] Применение 3-мм и шарнирных 5-мм инструментов системы может оказаться наиболее полезным в детской урологии, о чем также уже есть публикации.[5]
Что касается стоимости обслуживания системы, то за счет включения в работу стандартных лапароскопических инструментов, Senhance может быть потенциально экономичнее da Vinci.[5]
Важный момент. Роботизированная хирургическая система Senhance имеет Регистрационное удостоверение РЗН 2020/12899 от 05.05.2022 года.
Revo-i
Комплекс Revo-i является разработкой Meere Company по заказу Министерства науки Южной Кореи. Работа над его созданием началась в 2010 году, а в 2015 MSR-500 REVO-i был представлен научной общественности.[1]
Система работает по принципу «ведущий – ведомый» и состоит из закрытой консоли хирурга, тележки с четырьмя роботическими руками, 3D HD-системы и многоразовых инструментов.[1]

Диаметр 3D-эндоскопа Revo-i – 10 мм. Инструменты с диаметром 7,4 мм имеют семь степеней свободы могут использоваться повторно до 20 раз,[5] что выгодно отличает эту робот-ассистированную хирургическую систему от da Vinci.
Также важным отличием от Да Винчи является наличие у Revo-i тактильной чувствительности.[1]
Исследования и применение
Робот-хирург получил одобрение FDA Южной Кореи в 2017 году и применяется в клинической практике.[1]
По результатам исследований на животных сделаны выводы о коротком сроке обучения и безопасности применения системы. Существуют публикации о выполнении реконструкции маточных труб, резекции почки и холецистэктомии у свиней.[1]
Первая публикация об испытании Revo-i с участием человека относится к 2018 году – система использовалась для проведения радикальной простатэктомии. Есть публикации о применении системы в абдоминальной хирургии. В сравнении с da Vinci, робот-хирург Revo-i обеспечил меньшее время пребывания пациента в стационаре, но операции продолжались дольше.[5] Также специалисты отмечают, что разброс движений при работе иглодержателем по сравнению с аналогичным показателем системы Да Винчи у Revo-i меньше.[1]
Первая робот-ассистированная операция с применением роботического эндоскопического комплекса Revo-i в России была проведена в апреле 2025 года в клинической больнице «РЖД-Медицина» имени Н. А. Семашко.
Важный момент. Роботизированный хирургический эндоскопический комплекс DIXION Revo-i имеет Регистрационное удостоверение РЗН 2024/22065 от 15.02.2024 года.
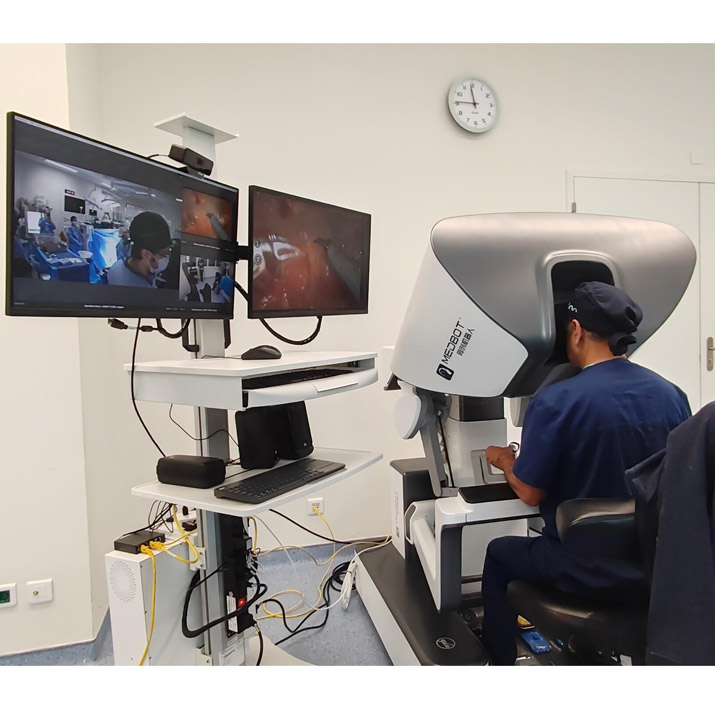
Toumai MT 1000
Одним из относительно новых, но перспективных роботов-хирургов является лапароскопический хирургический робот Toumai MT 1000, разработанный китайской компанией Shanghai Microport Medbot (Group) Company.[5] О нем не так много информации в русскоязычных источниках, однако на родине он получил признание и даже имеет несколько престижных международных премий («A’ Design Award 2022», «Red Dot Award 2022», «SAIL Award 2022», «Surgical Robotics Industry Awards 2025»), в том числе за применение искусственного интеллекта и развитие дистанционной хирургии.
Роботизированная хирургическая система Toumai MT 1000 состоит из консоли хирурга, консоли пациента с роботическими манипуляторами, эндоскопической системы визуализации с 3D Ultra HD (4K) камерой, набора инструментов.

К достоинствам Toumai MT 1000 специалисты относят наличие семи степеней свободы движения и инновационную технологию фильтрации тремора рук с применением искусственного интеллекта, что позволяет добиться точности позиционирования инструментов до 0,1 мм (у da Vinci 0,5 мм).
Регулировка масштабирования движений позволяет передавать движения хирурга роботизированным рукам более деликатными и точными (масштаб: 5:1, 10:1 и 20:1). Это важно для уменьшения травмирования тканей, мелких сосудов и нервов.
Разрешение 4K и 10-кратное увеличение обеспечивает высококачественную визуализацию места операции. Также Toumai MT 1000 предоставляет возможности автоматической адаптации резкости и режима спектрального анализа тканей, чего нет у Да Винчи. Режим «картинка в картинке» позволяет выполнять операции под контролем КТ, МРТ, УЗИ (эта возможность у da Vinci ограничена).
Комфорт работы хирурга обеспечивают: технология улучшения изображений, исключающая влияние дыма от электрохирургических инструментов и снижающая затуманенность; адаптивный интерфейс с ИИ-помощником и поддержкой команд голосом; удобное место хирурга с поддержкой для спины, снижающее нагрузку на позвоночник и мышцы во время продолжительных операций.
В роботизированной хирургической системе Toumai MT 1000 реализован VR-тренажер с автоматическими подсказками, что позволяет быстрее освоить работу с ней. Применение двух консолей делает возможными совместные операции и обучение молодых специалистов.
Создатели комплекса тщательно продумали вопрос безопасности: в нем есть функции предупреждения столкновений в реальном времени, контроля инструментов вне рабочего поля, автоматической классификации и распознавания тканей, а также система дублирования критических узлов.
Модульное строение Toumai MT 1000 позволяет адаптировать его для работы в общей, торакальной и сердечно-сосудистой хирургии, гинекологии и урологии. В детской хирургии аппарат ещё уступает da Vinci. Однако время его перенастройки составляет всего 5 минут, что меньше, чем у аналогов.
Исследования и применение
В мае 2025 года Toumai MT 1000 получила разрешение на продажу от NMPA (National Medical Products Administration, Национального управления по контролю за продуктами медицинского назначения) Китая. Это делает её первой в мире телеуправляемой роботизированной хирургической системой, разрешенной для коммерческого клинического использования.[12] Также система применялась для первой в мире дистанционной робот-ассистированной операции (Флорида, США), получившей одобрение FDA-IDE.
В публикациях отражается применение Toumai MT 1000 для таких операций, как: радикальная простатэктомия (Шанхайская восточная больница, ноябрь 2019 г.), парциальная и радикальная нефрэктомия, нефроуретерэктомия.[5][7] Медиана длительности операции составила 120 минут для резекции почки, 140 минут – для радикальной нефрэктомии.[5]
Согласно данным публикаций, система Toumai MT 1000 показала приемлемую продолжительность операции (RARP: 182,6 мин.; RAPN: 127,1 мин.) и низкий процент осложнений (1 случай ≥ III степени по классификации Clavien-Dindo). Не потребовалось конверсии в открытую операцию, переливание крови потребовалось лишь в одном случае. Функциональные и онкологические результаты были благоприятными, функция почек сохранилась (еСКФ: 96,02 мл/мин/1,73 м²), а частота положительных хирургических краев была низкой (RAPN: 0 %; RARP: 5 %). Удаленные операции на расстоянии до 2700 км были успешно проведены с задержкой менее 70 мс. Экспериментальные трансконтинентальные исследования на животных показали стабильную работу системы с задержкой 250 мс.[7]
Специалисты выражают мнение о том, что роботизированная хирургическая система Toumai MT 1000 представляется безопасной и эффективной платформой для урологической хирургии.[7]
Что касается стоимости системы и её обслуживания, то она выгодно отличается от расходов на приобретение и обслуживание системы da Vinci, что позволяет специалистам говорить о целесообразности её внедрения, особенно в регионах с ограниченными ресурсами или в отдаленных районах. Однако, также они считают необходимым подтверждение эффективности и безопасности системы с помощью дальнейших контролируемых исследований.[7]
Важный момент. Роботизированная хирургическая система Microport Medbot Toumai модель MT 1000 получила Регистрационное удостоверение РЗН 2025/25698 18 июня 2025 года.
Flex
Интересна разработка компании Medrobotics – эндолюминальный робот Flex Robotic System (TFRC), предназначенный для применения в однопортовой хирургии LESS. Основное отличие этой роботизированной системы от Да Винчи – доступ к хирургическому полю без необходимости разрезов на теле.
Конструктивно роботизированная система представляет собой гибкую трубку, управляемую хирургом с помощью джойстика. Визуализацию обеспечивает HD-камера на конце трубки. Единственная автономная функция Flex – возвращение из тела пациента по окончании операции.
Ассистивный хирургический комплекс оснащен приборами для прижигания, разрезания, захвата тканей, откачивания жидкости. Тонкий и гибкий робот-хирург проникает через рот в желудок человеку, находящемуся под наркозом, делает прокол и направляется к нужному органу.[6]

К преимуществам хирургического робота специалисты относят: сокращение продолжительности операции и воздействия на пациента наркоза, ускорение восстановления и улучшение протекания послеоперационного периода. Кроме того, робот-хирург Flex стоит в два раза дешевле da Vinci.[6]
Применение этой хирургической системы позволит оперировать ранее бывшие неоперабельными случаи, такие как опухоли в горле, и работать с пациентами с анатомическими особенностями.
Исследования и применение
Одобрение FDA роботизированная хирургическая система Flex получила в 2015 году. У регулятора возник вопрос к автономности системы. На европейский рынок система попала годом раньше.[13] Также она имеет разрешение для применения в Австралии.
Согласно имеющимся данным, роботизированная хирургическая система Flex продемонстрировала ряд важных преимуществ благодаря сочетанию гибкого эндоскопа, обеспечивающего доступ к труднодоступным участкам, и возможности фиксации для проведения процедуры.[11] Она обеспечивает доступ к структурам головы и шеи, таким как ротоглотка, для лечения которых в противном случае потребовались бы более инвазивные методы. Система обеспечивает тактильную обратную связь, которой нет в роботизированной системе da Vinci. Все эти преимущества могут способствовать сокращению сроков пребывания в стационаре и уменьшению количества послеоперационных осложнений по сравнению с традиционной хирургией.[11]
Versius
Роботическая хирургическая система Versius была разработана компанией CMR Surgical и в будущем может стать достойной альтернативой Да Винчи. На декабрь 2025 компания сообщала о получении одобрения FDA для второго поколения этого хирургического робота для холецистэктомии и планах его коммерциализации с 2026 года.
Робот-хирург создан в сотрудничестве с учеными Кембриджа[5] и состоит из открытой консоли, которую можно использовать в положении сидя или стоя, и трех-четырех отдельных прикроватных блоков.[5]

Манипуляторы индивидуально установлены на подвижных тележках и дистанционно управляются через консоль. Каждая роботическая рука состоит из плечевого, локтевого, запястного суставов. В отличие от da Vinci, Versius обеспечивает тактильную связь. Инструменты системы имеют диаметр 5 см и семь степеней свободы.[5]
Оптическая система обеспечивает создание 3D-HD-изображений с помощью поляризованных очков.[5]
Исследования и применение
Существуют публикации об использовании роботизированной хирургической системы Versius для процедур на простате и почках человеческих трупов и свиней в ходе доклинических испытаний.[5]
Есть данные о клинических испытаниях этого робота-хирурга: о возможности применения системы в гинекологии и общей хирургии свидетельствуют отчеты D. Kelkar и соавторов, для радикальной простатэктомии – Rocco и соавторов. По данным отчетов, время стыковки системы – 30 минут, консольное время – 130 минут; интраоперационные проблемы были ограничены из-за контакта троакара с кожей пациента. Течение послеоперационного периода у пациента было без осложнений.[5]
Робот-хирург Versius применялся для операций в урологии, включая радикальную простатэктомию, радикальную нефрэктомию, пиелопластику, адреналэктомию. Из отчетов следует, что предоперационная подготовка включала 6 часов обучения на виртуальном тренажере для хирургов и тренировку на трупах для всей хирургической бригады. По итогам операций нет случаев конверсии и серьезных осложнений, однако у одного пациента с простатэктомией возникла утечка мочи, потребовавшая отсроченного удаления катетера.[5]
По результатам более крупной серии наблюдений, всего 6 процедур из 106 потребовали конверсии в открытые операции, в 2 случаях произошла неисправность роботических рук, а осложнения после операций были у 7,5% пациентов. По сравнению с da Vinci, значительной разницы в периоперационных результатах выявлено не было. Общение между хирургом и ассистентами было проще из-за открытой конструкции консоли, но столкновения роботических рук случались чаще, чем у Да Винчи.[5]
Hugo RAS
Роботизированная хирургическая система Hugo RAS производства компании Medtronic (США) состоит из открытой консоли хирурга с двумя контроллерами с пистолетной рукояткой и ножным переключателем для управления камерой, источника энергии, запасной роботической руки.[7]
Роботизированные манипуляторы расположены на четырех независимых тележках. Каждый из них имеет шесть сочленений для расширения диапазона движений. К достоинствам хирургического робота Hugo RAS относится технология отслеживания движения головы операторов с помощью специальных 3D-очков.[7]

Исследования и применение
В декабре 2025 года Medtronic объявила, что робот-хирург Hugo RAS получил одобрение FDA для использования в урологических хирургических процедурах. Для использования в Евросоюзе система была одобрена в 2022 году (гинекологические и урологические операции).[7]
Впервые для клинического применения хирургический робот Hugo RAS был использован в 2021 году в Чили.[7] На сегодняшний день есть публикации о его применении в простатэктомии и нефрэктомии, в основном с удовлетворительными результатами.[5] Также есть данные о применении робота-хирурга при проведении неонкологических операций (вкл. реимплантацию мочеточника, уретеролитотомию и пиелопластику), адреналэктомии, холецистэктомии.[5] По результатам обзоров операций с хирургической системой Hugo RAS, специалисты заключают, что она достаточно безопасна и надежна.[5]
Avatera
Роботизированная хирургическая система Avatera, разработанная в Германии, состоит из тележки для пациента, оснащенной тремя роботическими руками для 5-мм шарнирных одноразовых инструментов и дополнительной рукой для 10-мм эндоскопа, имеет открытую консоль и 3D-экран Full HD. Манипуляторы имеют семь степеней свободы, управление осуществляется с помощью петлеобразных ручек.[5]

Исследования и применение
Разрешение на применение в Европе для гинекологических и урологических малоинвазивных операций система получила в 2019 году, а в 2022 году получила сертификат EU CE. Тогда же робот-хирург был впервые использован для операции на человеке.[5]
Система применялась для радикальной нефрэктомии и радикальной цистэктомии на модели свиньи. Также в открытом доступе есть информация о её клиническом использовании для робот-ассистированных операций на человеке: пиелопластики, радикальной простатэктомии. Все операции завершились успешно. Среднее время стыковки составило 10 (5–40) минут, среднее консольное время — 103,5 (90–121) минуты. Конверсии в лапароскопическую или открытую операцию не потребовалось. Никаких серьезных осложнений отмечено не было. У 2 пациентов отмечался положительный край резекции.[5]
KangDuo
Китайская разработка – система роботизированной хирургии KangDuo-Surgical Robot-01 от Suzhou KangDuo Robot Company состоит из консоли управления хирурга, трёхрукой тележки пациента, оптической системы с высоким разрешением и многоразовых эндоскопических инструментов.

Исследования и применение
Впервые в клинической практике робот использовался в 2021 году в Китае. О его применении в робот-ассистированной хирургии существует ряд исследований. В частности, о пиелопластике и радикальной простатэктомии. Длительность операции с KangDuo больше, чем у Да Винчи, но серьезных послеоперационных осложнений не было зафиксировано и существенных различий между системами по объему кровопотери, пребыванию пациентов в больнице, биохимическому рецидиву не установлено. Есть информация о применении хирургического робота для резекций почки, реконструкций мочевыводящих путей, адреналэктомии.[5]
Hinotori
Система Hinotori с полузакрытой консолью разработана японской компанией Medicaroid. Этот хирургический робот представляет платформу «без стыковки». Он состоит из консоли хирурга, хирургического блока и блока визуализации и оснащен четырьмя роботическими руками.[5]
Манипуляторы системы имеют многочисленные сочленения и могут двигаться по восьми осям. Управление инструментами осуществляется с помощью петлеобразных ручек. Оптическая система робота-хирурга обеспечивает создание 3D-изображения с помощью окуляра, похожего на окуляр микроскопа.[5]

Исследования и применение
Первый отчет о платформе включал информацию о нескольких урологических процедурах, выполненных на трупах и на свиных моделях.[5]
В 2020 году роботизированная хирургическая система Hinotori была одобрена регулирующими органами Минздрава, труда и социального обеспечения Японии для применения в урологии. В 2022 году система получила одобрение для операций в гинекологии и желудочно-кишечной хирургии. Также она имеет допуск в Сингапуре (2023 год) и в Малайзии (2024 год). Первая робот-ассистированная операция с ее применением за пределами Японии прошла в 2024 году в Сингапуре (радикальная простатэктомия).
Данные о применении роботизированной системы в хирургии свидетельствуют о 30 пациентах с радикальной простатэктомией, прооперированных с её помощью. При этом среднее консольное время составило 165 минут (больше, чем у Да Винчи), было зарегистрировано четыре случая неисправности оборудования, у четырех пациентов описан положительный хирургический край резекции, в 10% случаев — неблагоприятные события, не повлиявшие на исход операции.[5]
В другом, более позднем, исследовании серии из 30 случав пациентов после частичной нефрэктомии с хирургическим роботом Hinotori, говорится о применении как интраперитонеальных, так и ретроперитонеальных подходов. Информации о конверсии в лапароскопию, серьезных периоперационных осложнениях или положительных хирургических краях нет.[5]
В 2023 году была проведена первая робот-ассистированная операция рака прямой кишки с помощью роботической платформы Hinotori. Она продолжалась 134 минуты. Пациента выписали через 10 дней, осложнений не зафиксировано. Есть данные об операциях с применением робота-хирурга Hinotori: гастрэктомии для лечения рака желудка, хирургических вариациях резекции и эзофагогастростомии. Время операций значительно превышает время, за которое их можно провести с помощью хирургической системы da Vinci (медиана времени 282 минуты, медиана консольного времени – 226 минут). У одного пациента после проксимальной гастрэктомии наблюдалась несостоятельность анастомоза.[5]
Сравнение роботов-хирургов da Vinci и Hinotori провели T. Tobe и соавторы. Они выполнили исследование случаев лапароскопической пиелопластики на примере данных 11 пациентов, прооперированных с помощью системы Hinotori, и 30, прооперированных с применением Да Винчи. Результаты составили соответственно: медиана времени операции в группах – 236,0 и 231,5 минуты (p=0,480); показатели эффективности – 100,0% и 96,7% (p=1,000); осложнения степени ≥3 по шкале Clavien–Dindo – у одного пациента (9,1%) в группе Hinotori и у одного пациента (3,3%) в группе da Vinci (p=0,470).[5]
Dexter
Швейцарский робот-хирург Dexter произведен компанией Distalmotion. Он оснащен открытой мобильной, адаптируемой консолью, за которой можно работать как стоя, так и сидя. В Dexter применяются одноразовые шарнирные инструменты диаметром 8 мм, но также он совместим с лапароскопическими инструментами и может использоваться с любой коммерческой лапароскопической стойкой.[5]
К достоинствам системы специалисты относят то, что хирург, работая за ней, остается стерильным и может легко переключаться между робот-ассистированной хирургией и традиционной лапароскопией.[5]

Исследования и применение
Хирургический робот Dexter получил, по данным на май 2025 года, два разрешения от FDA: в 2024 – для герниопластики, затем – для холецистэктомии у взрослых.
Первые операции с применением этого робота-хирурга были проведены в 2022 году в Берне (простатэктомия). Также есть данные о субтотальной гистерэктомии с цервикосакропексией у 43-летней женщины с аденомиозом и рецидивирующим пролапсом матки (Клиника гинекологии и акушерства Университетского госпиталя Шлезвиг-Гольштейна в Киле (Германия). По имеющимся данным, процедура прошла без интраоперационных осложнений в течение 120 минут, кровопотеря не превышала 10 мл. Время стыковки составило 6 минут. Проблем с оборудованием или столкновения роботических рук не возникло.[5]
Российские роботы-хирурги
Отечественные компании также работают над созданием роботизированных систем, большая часть из которых находится на этапе разработки и доклинических испытаний. Однако публикации в СМИ внушают надежду на то, что российские роботы-хирурги скоро смогут составить конкуренцию зарубежным.
Этот вопрос тем более важен, что в ситуации стремительного развития робот-ассистированной хирургии и засилья на российском рынке da Vinci количество систем остается недостаточным для оказания медицинской помощи, а их цена и стоимость обслуживания очень высоки.[8]
LevshAI
Одним из примеров российской роботизированной хирургической системы является комплекс LevshAI («Левша»), разработанный компанией «Нейроспутник». Он включает роботизированное устройство для удаленной хирургии; тренажер для хирургов и сервис персонализированной хирургии. Система предназначена для дистанционных нейрохирургических эндоваскулярных операций и обеспечивает обратную тактильную связь.

Операционный блок роботизированной системы находится вне операционной. Управление осуществляется с помощью специальных контроллеров, передающих сигнал в интеллектуальный блок робота-хирурга, откуда подаются команды в оперирующий блок. Оперирующий блок копирует движения хирурга и перемещает катетеры и хирургические инструменты по сосудам головного мозга. Для контроля их передвижения применяются рентгенофлуороскоп и оптические датчики. ИИ обрабатывает информацию и передает ее на визуальный блок управления «Левши», который показывает рентгеновское изображение сосудов головного мозга пациента в реальном времени.
Искусственный интеллект «Левши» нивелирует тремор рук хирурга и выявляет критические ситуации. Кроме того, робот-хирург может создавать индивидуальный 3D-макет сосудов мозга пациента и позволяет отрабатывать навыки на тренажере в режиме обучения и персонализированной симуляции.
Обратную связь обеспечивают пьезодатчики, расположенные вдоль катетера. При этом также применяется искусственный интеллект: для фильтрации шумов и удаления артефактов, что позволяет добиться максимальной обратной связи при возникновении механического сопротивления в кровеносных сосудах мозга или когда катетер упирается в стенку сосуда.
По словам генерального директора компании «Нейроспутник» Александры Бернадотт, LevshAI – уникальная разработка, еще не имеющая аналогов в мире. Она также анонсировала внедрение в систему интерфейса «мозг-компьютер» для более быстрой передачи команд. Для исключения неполадок системы во время работы учеными МИСИС для нее был разработан проект киберзащиты.
Исследования и применение
Роботизированная хирургическая система LevshAI прошла доклинические испытания в ассоциации эндоваскулярных нейрохирургов имени академика Ф. А. Сербиненко. Здесь же планируется провести клинические испытания робота. В 2023 году «Левша» вошел в число пяти проектов, поддержку которым окажет Агентство стратегических инициатив.
AST
Еще одна российская разработка – робот-хирург AST (Assisted Surgical Technologies), к созданию которого были привлечены и медики, такие как Дмитрий Пушкарь (руководитель Клиники урологии МГМСУ) и Сергей Шептунов (директор Института конструкторско-технологической информатики РАН).

В основу системы положено платформенное решение. Как говорят создатели, она не станет копией Да Винчи и даже предоставит хирургам больше возможностей, включая применение лазера и других инструментов. Планируется, что система будет иметь значительную автоматизацию и инструменты на базе ИИ.[8]
Существенным достоинством российского робота-хирурга должна стать цена, намного меньшая, чем у зарубежных аналогов. На стоимость обслуживания должна повлиять и возможность использования недорогих одноразовых инструментов.[8]
Заключение
Развитие робот-ассистированной хирургии открывает новые возможности лечения пациентов, ускоряет их выздоровление, снижает риск осложнений и снимает часть финансовой нагрузки как с самих больных и медучреждений, так и с государства.
Для повсеместного внедрения РАХ в клиническую практику необходимо, во-первых, получить достаточные сведения об имеющихся роботах-хирургах для оценки их безопасности и эффективности, а во-вторых, осуществить оснащение медицинских учреждений и обучение врачей.
Несмотря на то, что лидером на рынке роботизированных хирургических систем в последние десятилетия была линейка da Vinci, уже сейчас разработаны и еще разрабатываются системы, аналогичные ей по возможностям и даже отчасти превосходящие (в частности, это касается тактильной обратной связи и открытой консоли хирурга, упрощающей общение хирурга с ассистентами).
Большой вклад в повышение точности и безопасности робот-ассистированных операций вносит внедрение в хирургические системы искусственного интеллекта.