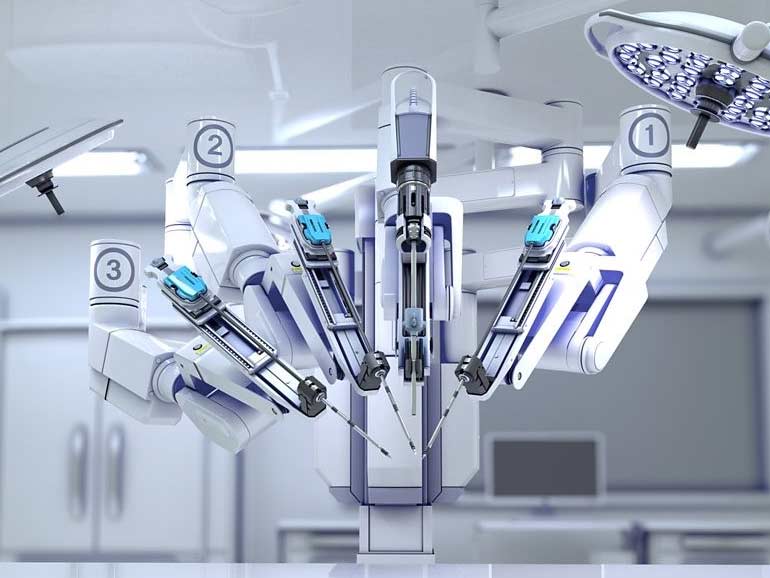
Хирургические операции проводимые с ассистенцией роботических систем принято объединять в понятие роботизированная хирургия. Первая операция с применением робота была выполнена в конце прошлого столетия нейрохирургом V. Kwoh, который при помощи автоматизированного манипулятора Puma осуществил пункцию головного мозга. В настоящее время, когда речь заходит о роботических хирургических системах, медицинское сообщество ассоциирует обозначенное определение с роботизированной системой da Vinci - разработкой компании «Intuitive Surgical». Вершина инженерной мысли – система высокофункциональных хирургических телеманипуляторов насчитывает более пяти тысяч установок по всему миру.
Эффективнее, чем руки хирурга
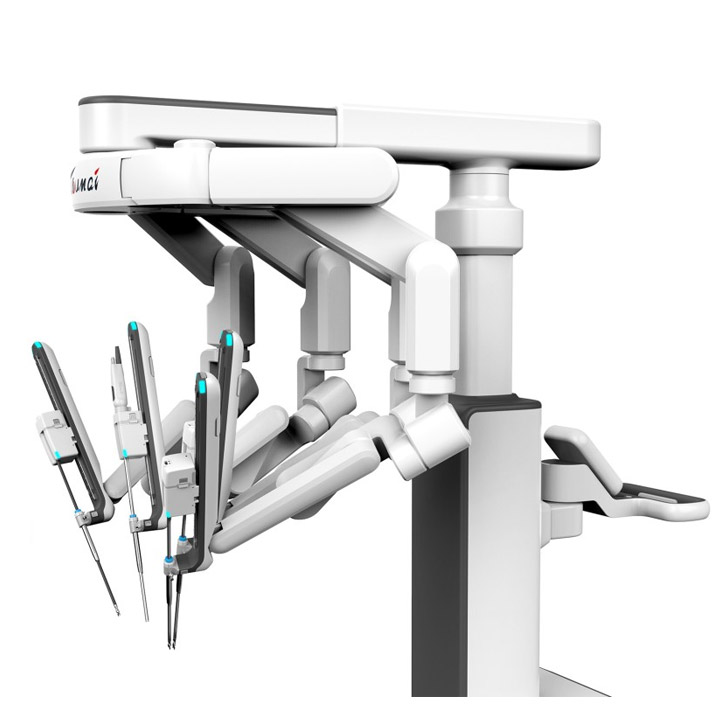
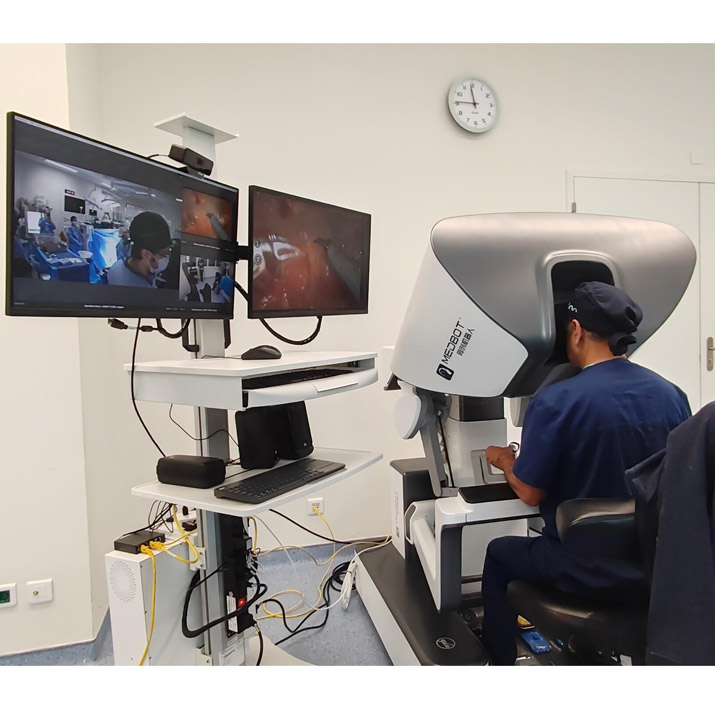
Биомеханика рук человека при открытых операциях, амплитуда и углы атаки традиционных лапароскопических инструментов не обладают той маневренностью и точностью, которые появляются за счет применения роботического инструментария. Манипуляторы da Vinci имеют семь степей свободы и высокую амплитуду рабочей части, что больше, чем у человеческой кисти и способны к изгибам на 90 градусов. Блок управления установкой обеспечивает эргономичное положение рук в джостиках, устраняет физиологический тремор, а компьютерная обработка больших амплитуд движений кистей и пальцев хирурга преобразовывается в точные – ювелирно деликатные движения манипуляторов в операционном поле. Положение сидя за блоком управление избавляет оператора от физического перенапряжения, делает многочасовые операции более комфортными. Динамики с микрофонами, установленные на хирургической консоли и тележке пациента, обеспечивают акустическую связь хирурга с ассистентами в операционной. Управление системой с консоли хирурга осуществляется джойстиками и ножными педалями.

Точнее человеческого глаза
Отдельного внимания заслуживают методы визуализации. Пространственная – трехмерная система видения позволяет «погрузиться» в операционное поле, зрительно воспринимать объемы и глубину анатомических структур, что отсутствует в традиционной лапароскопии. Потенциал визуализации расширяется, когда во время операции возможно интегрировать данные инструментальных методов обследования (МРТ, КТ. УЗИ, ангиография и т.д.). Составление навигационной карты пациента повышает шансы на успешное выполнение операции.
Особенности и недостатки
Безусловно у da Vinci выделяют и ряд недостатков основным из которых является высокая стоимость установки в целом и расходных материалов в частности. Чипированные манипуляторы рассчитаны на определённое количество оперативных вмешательств, после чего система блокирует их работу и требует замены. Определенные трудности связаны как с длительностью настройки системы, так и со временем обучения персонала.
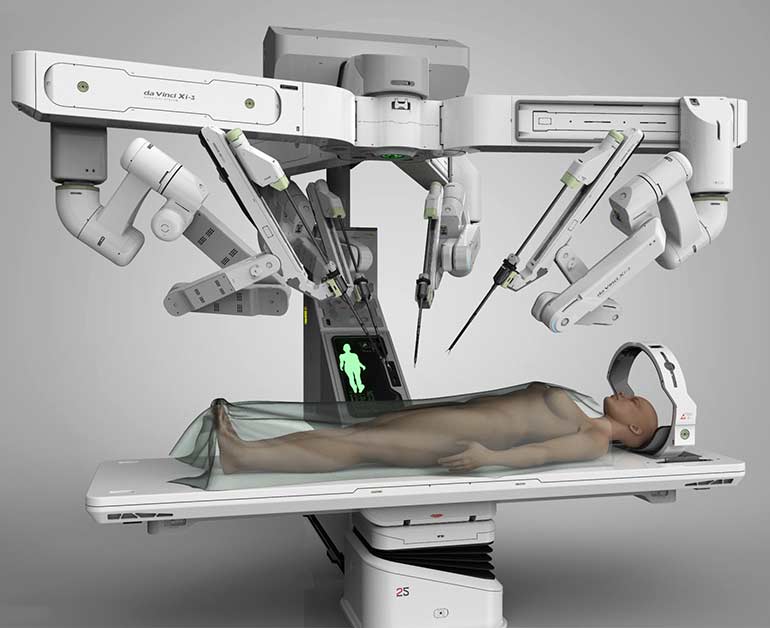
Нельзя не отметить и большее количество вводимых в брюшную полость троакаров, их увеличенный диаметр по сравнению со стандартными лапароскопическми инструментами, что способствует большей травматизации передней брюшной стенки. К минусам можно отнести затрату дополнительного времени перед оперативным вмешательством, что связано с настройкой системы и правильной установки стойки манипуляторов относительно пациента.
Настоящее и будущее роботизированной хирургии
С использованием роботизированных хирургических систем da Vinci по всему миру проводятся высокоточные операции в области хирургии головы и шеи, гинекологии, урологии. Преимущества роботизированной хирургии бесспорны и превалируют над недостатками, которые будут сведены к минимуму с распространением системы и развитием технологи. Минимизация травматизации органов и тканей во время операции – главная цель хирургии двадцать первого века. С приходом хирургического робота da Vinci в сообществе профессионалов произошла глобальная перемена мировоззрения – новый виток развития медицины. Хирургия никогда не будет прежней.